基于单片机的步进电机控制系统设计
基于单片机的步进电机控制系统设计
随着科技的不断发展,步进电机因其高精度、高稳定性等优点,在工业自动化、精密定位等领域得到了广泛应用。本文将介绍一种基于单片机的步进电机控制系统设计,旨在实现步进电机的精确控制。
一、引言
步进电机是一种将电脉冲信号转换为角位移的电动机,其转动角度与输入脉冲数成正比。由于其定位精度高、控制简单、响应速度快等特点,步进电机在工业自动化、精密定位等领域得到了广泛应用。本文设计的基于单片机的步进电机控制系统,旨在实现步进电机的精确控制,提高系统的稳定性和可靠性。
二、系统组成
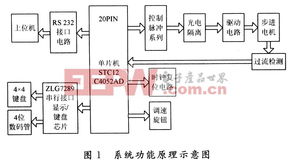
基于单片机的步进电机控制系统主要由以下几部分组成:
单片机:作为控制系统的核心,负责接收输入信号、处理数据并输出控制信号。
步进电机:作为控制对象,通过接收脉冲信号来驱动电机按设定的方向、速度和步数进行精确转动。
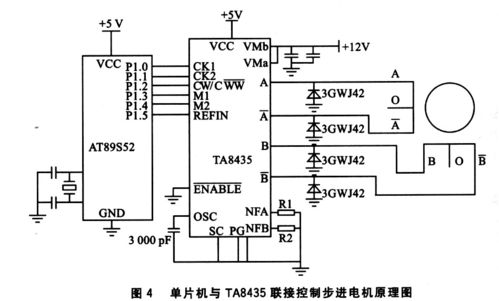
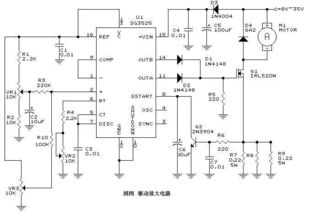
驱动电路:负责将单片机的控制信号转换为步进电机可以识别的电信号,从而驱动步进电机运转。
控制接口:包括按键、遥控器等输入设备,用于用户输入控制指令,如启停、正反转、速度调节等。
显示模块:如LED数码管、液晶显示屏等,用于实时显示步进电机的状态信息,如当前位置、转速等。
电源模块:为整个系统提供稳定的电源供应。
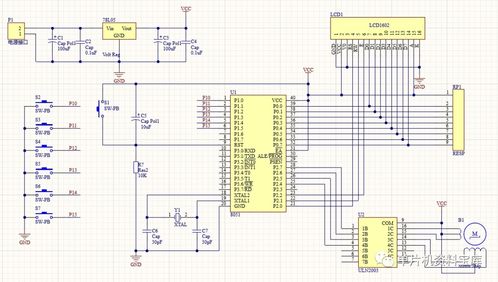
三、硬件设计
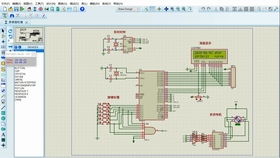
硬件设计主要包括单片机选型、驱动电路设计、控制接口设计、显示模块设计、电源模块设计等。
单片机选型:本文选用STC89C52单片机作为控制核心,该单片机具有性能稳定、功耗低、易于编程等特点。
驱动电路设计:采用L298驱动芯片,该芯片能够提供足够的电流和电压来驱动步进电机。
控制接口设计:采用按键和遥控器作为输入设备,实现启停、正反转、速度调节等功能。
显示模块设计:采用LED数码管显示步进电机的状态信息,如当前位置、转速等。
电源模块设计:采用稳压电源为整个系统提供稳定的电源供应。
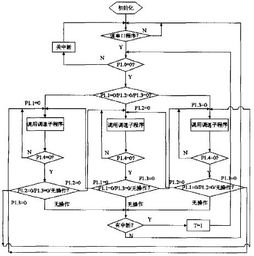
四、软件设计
软件设计主要包括程序编写和调试。本文采用C语言进行程序编写,主要实现以下功能:
接收用户输入的控制指令,如启停、正反转、速度调节等。
根据控制指令计算步进电机的转速和步数。
通过单片机输出控制信号,驱动步进电机运转。
实时显示步进电机的状态信息。
五、系统调试与测试
系统调试主要包括硬件调试和软件调试。硬件调试主要检查电路连接是否正确,电源是否稳定等。软件调试主要检查程序是否能够正常运行,控制指令是否能够正确执行等。
经过调试和测试,本文设计的基于单片机的步进电机控制系统能够实现以下功能:
精确控制步进电机的转速和步数。
实现步进电机的正反转控制。
实时显示步进电机的状态信息。
六、结论
本文介绍了一种基于单片机的步进电机控制系统设计,通过硬件设计和软件设计,实现了对步进电机的精确控制。该系统具有结构简单、成本低、易于实现等优点,适用于各种需要步进电机精确控制的场合。